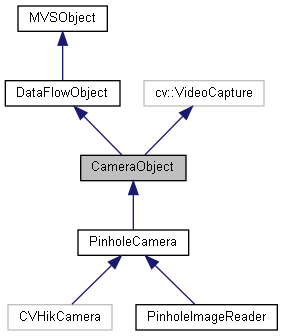
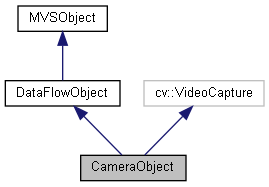
this is the base class of all types of cameras, the customized camera type should inherit this class, and implement the virtual methods in this class and OpenCV VideoCapture class. More...
#include <CameraObject.h>
Public Types | |
| using | Ptr = std::shared_ptr< CameraObject > |
| shared pointer | |
 Public Types inherited from DataFlowObject Public Types inherited from DataFlowObject | |
| using | Ptr = std::shared_ptr< DataFlowObject > |
| the shared pointer type of DataFlowObject | |
Public Member Functions | |
| CameraObject () | |
| Construct a new Camera Object object. More... | |
| CameraObject (std::string CameraName) | |
| Construct a new Camera Object object. More... | |
| virtual | ~CameraObject () |
| Destroy the Camera Object object. | |
| std::string | getCameraName () |
| Get the Camera Name. More... | |
| virtual bool | undistort (const cv::Mat &src, cv::Mat &dst)=0 |
| Transforms an image to compensate for lens distortion. this is a pure virtual function, the real undistort algorithm should be implemented. More... | |
| virtual bool | open () |
| open the camera with the preloaded parameter More... | |
| bool | save (JsonNode &fs) override |
| save data and settings to file More... | |
| bool | load (JsonNode &fs) override |
| load data and settings from file More... | |
| virtual std::string | type_name () override |
| get the typename. More... | |
| Public Member Functions inherited from DataFlowObject | |
| DataFlowObject () | |
| Construct a new Data Flow Object object. | |
| virtual | ~DataFlowObject () |
| Destroy the Data Flow Object object. | |
| Public Member Functions inherited from MVSObject | |
| MVSObject () | |
| Construct a new MVSObject object. | |
| virtual | ~MVSObject () |
| Destroy the MVSObject object. | |
| virtual bool | save (JsonNode &fs)=0 |
| save data and settings to file More... | |
| virtual bool | load (JsonNode &fs)=0 |
| load data and settings from file More... | |
| virtual std::string | type_name () |
| get the typename. More... | |
Protected Attributes | |
| std::string | CameraName |
| cv::Size2i | ImageSize |
Additional Inherited Members | |
| Static Public Member Functions inherited from DataFlowObject | |
| static void | cvMat2Sophus (const cv::Mat1d &Mat, Sophus::SE3d &Pose) |
| create shared pointer of DataFlowObject, do NOT use this method directly, use the Create() method in derived class. More... | |
| static void | Sophus2cvMat (const Sophus::SE3d &pose, cv::Mat1d &Mat) |
| static cv::Mat1d | Rt2T (const cv::Mat1d &R, const cv::Mat1d &t) |
| static std::tuple< cv::Mat1d, cv::Mat1d > | T2Rt (const cv::Mat1d &T) |
| Protected Member Functions inherited from MVSObject | |
| bool | isDirExist (std::string path) |
| check if the directory is exist. More... | |
| bool | mkdir (std::string path) |
| create directory in given path. More... | |
Detailed Description
this is the base class of all types of cameras, the customized camera type should inherit this class, and implement the virtual methods in this class and OpenCV VideoCapture class.
Constructor & Destructor Documentation
◆ CameraObject() [1/2]
| CameraObject::CameraObject | ( | ) |
Construct a new Camera Object object.
- Parameters
-
CameraName the unique name of Camera
◆ CameraObject() [2/2]
| CameraObject::CameraObject | ( | std::string | CameraName | ) |
Construct a new Camera Object object.
- Parameters
-
CameraName camera name
Member Function Documentation
◆ getCameraName()
| std::string CameraObject::getCameraName | ( | ) |
Get the Camera Name.
- Returns
- std::string Camera name
◆ load()
|
overridevirtual |
load data and settings from file
this method will load data such as keypoints, descriptors, translation matrices in DataFlowObject and its sub-classes from the given JsonNode instance. or will load parameters and settings in WorkFlowObject and its sub-classes to the given JsonNode instance, and automatically initialize the WorkFlow with these parameters
- Parameters
-
fs the json handler
- Returns
- true load successfully
- false load failed or initialization falied.
Implements MVSObject.
Reimplemented in PinholeCamera.
◆ open()
|
virtual |
◆ save()
|
overridevirtual |
save data and settings to file
this method will save data such as keypoints, descriptors, translation matrices in DataFlowObject and its sub-classes to the given JsonNode instance, or will save parameters and settings in WorkFlowObject and its sub-classes to the given JsonNode instance.
- Parameters
-
fs the json handler
- Returns
- true save successfully
- false save failed
Implements MVSObject.
Reimplemented in PinholeCamera.
◆ type_name()
|
overridevirtual |
get the typename.
- Returns
Reimplemented from MVSObject.
Reimplemented in PinholeImageReader, and PinholeCamera.
◆ undistort()
|
pure virtual |
Transforms an image to compensate for lens distortion. this is a pure virtual function, the real undistort algorithm should be implemented.
- Parameters
-
src Input (distorted) image. dst Output (corrected) image that has the same size and type as src.
- Returns
- true successfully undistort
- false undistort failed
Implemented in PinholeCamera.
The documentation for this class was generated from the following files:
- C:/Users/ZhouZishun/Documents/Workspace/EasyMVS/core/common/CameraObject.h
- C:/Users/ZhouZishun/Documents/Workspace/EasyMVS/core/common/CameraObject.cpp