Terrains
In addition to the API provided for adding flat ground planes into simulation environments, we also provide APIs and utilities for generating uneven terrains.
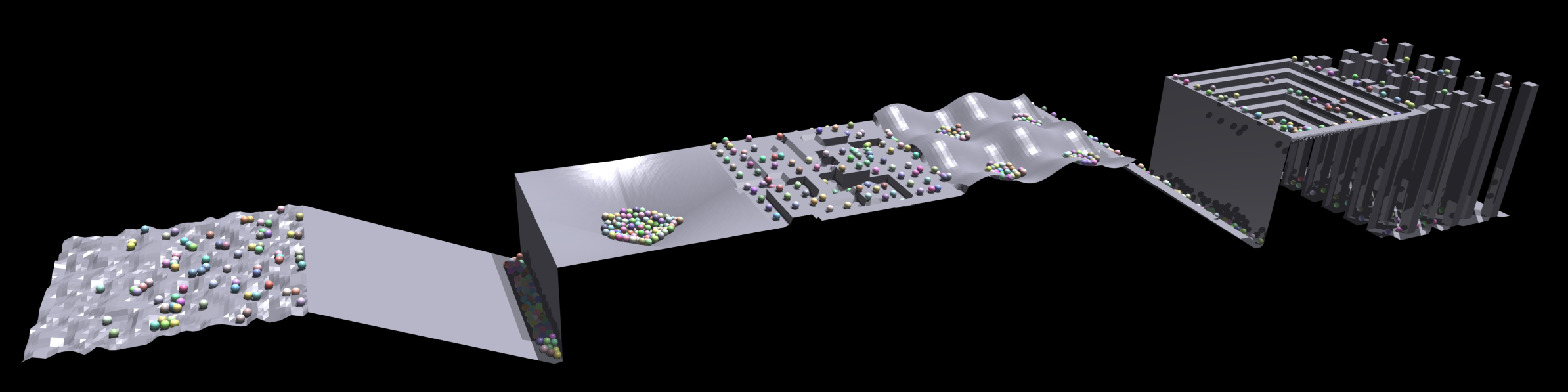
Terrains can be added as static triangle meshes using gym.add_triangle_mesh(). We provide utilities to generate some simple terrains in isaacgym/terrain_utils.py.
Different heightfield terrain types can be generated using: random_uniform_terrain(), sloped_terrain(), pyramid_sloped_terrain(), discrete_obstacles_terrain(), wave_terrain(), stairs_terrain(), pyramid_stairs_terrain(), and stepping_stones_terrain().
They can then be converted to a triangle mesh using convert_heightfield_to_trimesh() and added to the simulation.
Please see examples/terrain_creation.py for more details.
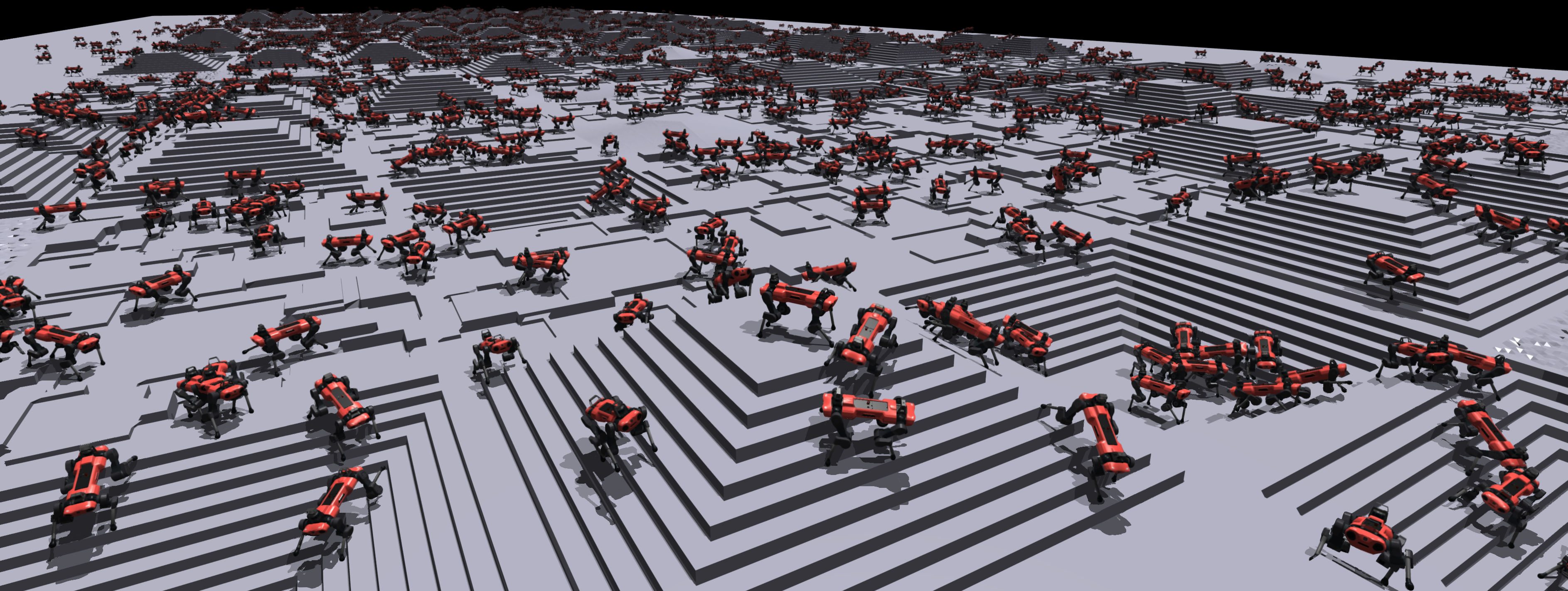
We also showcase an example of Reinforcement Learning with uneven terrain in our AnymalTerrain environment, which can be found at https://github.com/NVIDIA-Omniverse/IsaacGymEnvs.
Net Contact Force Issue
The net contact force reporting (gym.acquire_net_contact_force_tensor()) of rigid bodies colliding with triangle meshes is known to be unreliable at the moment.
Due to interactions with triangle edges the reported forces can be largely reduced or even completely missed at some timesteps.
The net contact force reporting will be improved in the future. As a workaround we propose to use force sensors (gym.create_asset_force_sensor()) or filter the reported contact net contact forces in the environment.