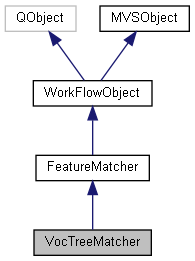
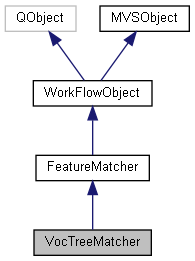
#include <VocTreeMatcher.h>
Public Types | |
| using | Ptr = std::shared_ptr< VocTreeMatcher > |
 Public Types inherited from FeatureMatcher Public Types inherited from FeatureMatcher | |
| using | Ptr = std::shared_ptr< FeatureMatcher > |
| shared pointer type of FeatureMatcher | |
| Public Types inherited from WorkFlowObject | |
| using | DataQueue = std::queue< DataFlowObject::Ptr > |
| using | Ptr = std::shared_ptr< WorkFlowObject > |
| shared pointer of WorkFlowObject | |
Public Member Functions | |
| VocTreeMatcher (GlobalMapObject::Ptr GlobalMap) | |
| bool | Compute (FrameObject::Ptr frame, GlobalMapObject::Ptr GlobalMap=GlobalMapObject::Ptr()) override |
| match the features of the current frame within the global map More... | |
| virtual bool | MatchRelatedFrame (FrameObject::Ptr frame, std::list< FrameObject::Ptr > &related, GlobalMapObject::Ptr GlobalMap=GlobalMapObject::Ptr()) override |
| find related frames of input frame within the global map. More... | |
| virtual bool | MatchKeyPoints (FrameObject::Ptr frame) override |
| find matched keypoints between the input frame and its related frame. More... | |
| virtual bool | MatchKeyPoints (FrameObject::Ptr queryFrames, FrameObject::Ptr trainFrames, std::vector< cv::DMatch > &matches) override |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| bool | save (JsonNode &fs) override |
| save data and settings to file More... | |
| bool | load (JsonNode &fs) override |
| load data and settings from file More... | |
| bool | clear () override |
| clear the workflow state, the workflow should be re-init after clear. More... | |
| virtual bool | isInit () override |
| check if the workflow is inited More... | |
| Public Member Functions inherited from FeatureMatcher | |
| FeatureMatcher::Ptr | Create (GlobalMapObject::Ptr GlobalMap) |
| create shared pointer of FeatureMatcher More... | |
| FeatureMatcher (GlobalMapObject::Ptr GlobalMap) | |
| Construct a new Feature Matcher object. More... | |
| virtual | ~FeatureMatcher () |
| Destroy the Feature Matcher object. | |
| std::string | type_name () override |
| get the typename. More... | |
| virtual bool | clear () override |
| clear the workflow state, the workflow should be re-init after clear. More... | |
| virtual bool | Compute (FrameObject::Ptr frame, GlobalMapObject::Ptr GlobalMap=GlobalMapObject::Ptr()) |
| match the features of the current frame within the global map More... | |
| virtual bool | MatchRelatedFrame (FrameObject::Ptr frame, std::list< FrameObject::Ptr > &related, GlobalMapObject::Ptr GlobalMap=GlobalMapObject::Ptr()) |
| find related frames of input frame within the global map. More... | |
| virtual bool | MatchKeyPoints (FrameObject::Ptr frame) |
| find matched keypoints between the input frame and its related frame. More... | |
| virtual bool | MatchKeyPoints (FrameObject::Ptr queryFrames, FrameObject::Ptr trainFrames, std::vector< cv::DMatch > &matches) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| bool | save (JsonNode &fs) override |
| save data and settings to file More... | |
| bool | load (JsonNode &fs) override |
| load data and settings from file More... | |
| Public Member Functions inherited from WorkFlowObject | |
| WorkFlowObject () | |
| Construct a new Work Flow Object object. | |
| virtual | ~WorkFlowObject () |
| Destroy the Work Flow Object object. | |
| virtual bool | clear ()=0 |
| clear the workflow state, the workflow should be re-init after clear. More... | |
| virtual bool | isInit () |
| check if the workflow is inited More... | |
| Public Member Functions inherited from MVSObject | |
| MVSObject () | |
| Construct a new MVSObject object. | |
| virtual | ~MVSObject () |
| Destroy the MVSObject object. | |
| virtual bool | save (JsonNode &fs)=0 |
| save data and settings to file More... | |
| virtual bool | load (JsonNode &fs)=0 |
| load data and settings from file More... | |
| virtual std::string | type_name () |
| get the typename. More... | |
Static Public Member Functions | |
| static VocTreeMatcher::Ptr | Create (GlobalMapObject::Ptr GlobalMap) |
Public Attributes | |
| std::string | VocPath |
| the path of vocabulary tree database. | |
Additional Inherited Members | |
| Public Slots inherited from FeatureMatcher | |
| void | Trigger () override |
| void | Trigger (DataQueue data) override |
| Public Slots inherited from WorkFlowObject | |
| virtual void | Trigger ()=0 |
| trigger one work load of the workflow with preload input and output settings. | |
| virtual void | Trigger (DataQueue data)=0 |
| trigger one work load of the workflow with input data. More... | |
| Signals inherited from WorkFlowObject | |
| void | Finished (DataQueue) |
| the current work load of the workflow is finished, and the processeed data pointer is stored in the queue, the workflow can be assigned to new work load with trigger() method More... | |
| void | Finished () |
| the current work load of the workflow is finished, the workflow can be assigned to new work load with trigger() method | |
| void | Failed () |
| the current work failed. | |
| void | Error (std::string error) |
| emit error message More... | |
| void | Progress (int progress) |
| emit percentage of the work load 0-100 More... | |
| void | Warning (std::string warning) |
| emit warning output message More... | |
| void | Info (std::string info) |
| emit information output message More... | |
| Protected Member Functions inherited from MVSObject | |
| bool | isDirExist (std::string path) |
| check if the directory is exist. More... | |
| bool | mkdir (std::string path) |
| create directory in given path. More... | |
| Protected Attributes inherited from FeatureMatcher | |
| GlobalMapObject::Ptr | GlobalMap |
| pointer of globalmap. | |
| Protected Attributes inherited from WorkFlowObject | |
| bool | m_isInit = false |
| default indicator of wether the workflow is initialized, the workflow may or may not use this variable to indicate if its initialized, it depends on the implementation of isInit() method. | |
Detailed Description
VocabularyTree It uses image retrieval techniques to find images that share some content without the cost of resolving all feature matches in details. Each image is represented in a compact image descriptor which allows to compute the distance between all images descriptors very efficiently. If your scene contains less than "Voc Tree: Minimal Number of Images", all image pairs will be selected.
Member Function Documentation
◆ clear()
|
overridevirtual |
clear the workflow state, the workflow should be re-init after clear.
- Returns
- true clear succeed
- false clear failed
Reimplemented from FeatureMatcher.
◆ Compute()
|
overridevirtual |
match the features of the current frame within the global map
- Parameters
-
frame inputoutput frame object GlobalMap the global map pointer, if the global map is empty, the method will use preloaded global map
- Returns
- true match succeed
- false match failed or input parameter incorrect
Reimplemented from FeatureMatcher.
◆ isInit()
|
overridevirtual |
check if the workflow is inited
- Returns
- true inited
- false not inited
Reimplemented from WorkFlowObject.
◆ load()
|
overridevirtual |
load data and settings from file
this method will load data such as keypoints, descriptors, translation matrices in DataFlowObject and its sub-classes from the given JsonNode instance. or will load parameters and settings in WorkFlowObject and its sub-classes to the given JsonNode instance, and automatically initialize the WorkFlow with these parameters
- Parameters
-
fs the json handler
- Returns
- true load successfully
- false load failed or initialization falied.
Reimplemented from FeatureMatcher.
◆ MatchKeyPoints() [1/2]
|
overridevirtual |
find matched keypoints between the input frame and its related frame.
- Parameters
-
frame inputoutput frame object
- Returns
- if matched keypoints found
Reimplemented from FeatureMatcher.
◆ MatchKeyPoints() [2/2]
|
overridevirtual |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
- Parameters
-
queryFrames query frame trainFrames train frame matches keypoint match info
- Returns
- if related frame found
Reimplemented from FeatureMatcher.
◆ MatchRelatedFrame()
|
overridevirtual |
find related frames of input frame within the global map.
- Parameters
-
frame input frame object related output related frame the global map pointer, if the global map is empty, the method will use preloaded global map @ return if related frame found
Reimplemented from FeatureMatcher.
◆ save()
|
overridevirtual |
save data and settings to file
this method will save data such as keypoints, descriptors, translation matrices in DataFlowObject and its sub-classes to the given JsonNode instance, or will save parameters and settings in WorkFlowObject and its sub-classes to the given JsonNode instance.
- Parameters
-
fs the json handler
- Returns
- true save successfully
- false save failed
Reimplemented from FeatureMatcher.
The documentation for this class was generated from the following files:
- C:/Users/ZhouZishun/Documents/Workspace/EasyMVS/core/FeatureExtraction/VocTreeMatcher.h
- C:/Users/ZhouZishun/Documents/Workspace/EasyMVS/core/FeatureExtraction/VocTreeMatcher.cpp