时间不多,今天这个模块就简单说以下吧.
HSADC模块简单介绍
kv58有adc模块,也有个人感觉功能更强大的HSADC模块.kv58拥有两个12bit的hsadc模块,最高采集速度可以到5mhz,可以采集140khz~80mhz的信号.有AB通道可以同时采集,也就是说kv58可以做到4通道同时采集.另外还有支持通道乱序扫描可以做到一次触发扫描全部16个通道,相比于adc模块需要不断触发和ping-pong采集来说,hsadc的确做得更加出色.另外,hsadc模块所有通道都支持差分输入,相比于adc只有4个通道(kv58只有两个通道)支持差分输入,配置更加灵活.此外,还有过零中断,超限中断,各种错误中断等等,也可以实现adc的比较功能.
HSADC模块结构简图

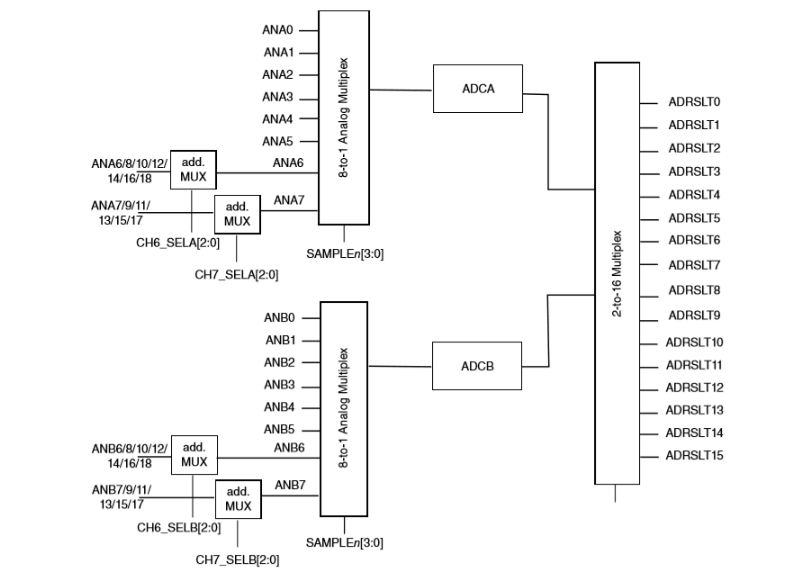
可以看出,整个结构相对于adc来说更加简洁.值得注意的是8~17通道的复用情况,需要配置相关寄存器实现复用.
HSADC软件触发中断(查询)示例
主程序
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
|
#include <string.h>
#include "board.h"
#include "pin_mux.h"
#include "clock_config.h"
uint16_t result;
int main(void) {
BOARD_InitBootPins();
BOARD_InitBootClocks();
BOARD_InitDebugConsole();
SIM->SCGC5 |= SIM_SCGC5_HSADC0_MASK;
NVIC_EnableIRQ(HSADC0_CCA_IRQn);
HSADC0->PWR=0;
HSADC0->CTRL1&=~HSADC_CTRL1_SMODE_MASK;
HSADC0->CTRL1|= HSADC_CTRL1_SMODE(4);
HSADC0->CTRL1|= HSADC_CTRL1_DMAENA_MASK;
HSADC0->CTRL1|= HSADC_CTRL1_EOSIEA_MASK;
HSADC0->CTRL1&=~HSADC_CTRL1_STOPA_MASK;
HSADC0->CTRL2|= HSADC_CTRL2_DIVA(2);
HSADC0->SDIS = 0xFFFE;
HSADC0->CTRL3 |= HSADC_CTRL3_ADCRES(3);
HSADC0->CTRL3 |= HSADC_CTRL3_DMASRC_MASK;
HSADC0->SCINTEN |= 1;
HSADC0->CTRL1 |= HSADC_CTRL1_STARTA_MASK;
for(;;) {
}
}
void HSADC0_CCA_IRQHandler()
{
gpio_pin_config_t test;
test.outputLogic=0;
test.pinDirection=kGPIO_DigitalOutput;
GPIO_PinInit(GPIOB,17,&test);
result=HSADC0->RSLT[0];
HSADC0->STAT |= HSADC_STAT_EOSIA_MASK ;
}
|
管脚分配
1
2
3
4
5
6
7
8
|
void BOARD_InitPins(void) {
CLOCK_EnableClock(kCLOCK_PortB);
CLOCK_EnableClock(kCLOCK_PortE);
PORT_SetPinMux(PORTB, PIN17_IDX, kPORT_MuxAsGpio);
PORT_SetPinMux(PORTE, PIN16_IDX, kPORT_PinDisabledOrAnalog);
}
|
EOF

 wechat
wechat





