|
|
| DualFrameReconstructor (GlobalMapObject::Ptr GlobalMap) |
| |
| bool | clear () override |
| | clear the workflow state, the workflow should be re-init after clear. More...
|
| |
| bool | Compute (FrameObject::Ptr frame) override |
| | computes disparity map for the frame with preloaded parameters, and preloaded best camera(s). More...
|
| |
| bool | Compute (FrameObject::Ptr frame1, FrameObject Frame2) override |
| | computes disparity map for the specified stereo pair with preloaded parameters, the output disparity map will be stored in the frame. More...
|
| |
| bool | load (JsonNode &fs) override |
| | load data and settings from file More...
|
| |
| bool | save (JsonNode &fs) override |
| | save data and settings to file More...
|
| |
| | DenseReconstructor (GlobalMapObject::Ptr GlobalMap) |
| | Construct a new Dense Reconstructor object with or without customized matcher. More...
|
| |
| std::string | type_name () override |
| | get the typename. More...
|
| |
| virtual bool | clear () override |
| | clear the workflow state, the workflow should be re-init after clear. More...
|
| |
| bool | save (JsonNode &fs) override |
| | save data and settings to file More...
|
| |
| bool | load (JsonNode &fs) override |
| | load data and settings from file More...
|
| |
| virtual bool | Compute (FrameObject::Ptr frame) |
| | computes disparity map for the frame with preloaded parameters, and preloaded best camera(s). More...
|
| |
| virtual bool | Compute (FrameObject::Ptr frame1, FrameObject Frame2) |
| | computes disparity map for the specified stereo pair with preloaded parameters, the output disparity map will be stored in the frame. More...
|
| |
| virtual bool | Compute (std::vector< FrameObject::Ptr > &frames) |
| | This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More...
|
| |
|
| WorkFlowObject () |
| | Construct a new Work Flow Object object.
|
| |
|
virtual | ~WorkFlowObject () |
| | Destroy the Work Flow Object object.
|
| |
| virtual bool | clear ()=0 |
| | clear the workflow state, the workflow should be re-init after clear. More...
|
| |
| virtual bool | isInit () |
| | check if the workflow is inited More...
|
| |
|
| MVSObject () |
| | Construct a new MVSObject object.
|
| |
|
virtual | ~MVSObject () |
| | Destroy the MVSObject object.
|
| |
| virtual bool | save (JsonNode &fs)=0 |
| | save data and settings to file More...
|
| |
| virtual bool | load (JsonNode &fs)=0 |
| | load data and settings from file More...
|
| |
| virtual std::string | type_name () |
| | get the typename. More...
|
| |
|
|
void | Trigger (DataQueue data) override |
| |
| void | Trigger () override |
| |
|
virtual void | Trigger ()=0 |
| | trigger one work load of the workflow with preload input and output settings.
|
| |
| virtual void | Trigger (DataQueue data)=0 |
| | trigger one work load of the workflow with input data. More...
|
| |
| void | Finished (DataQueue) |
| | the current work load of the workflow is finished, and the processeed data pointer is stored in the queue, the workflow can be assigned to new work load with trigger() method More...
|
| |
|
void | Finished () |
| | the current work load of the workflow is finished, the workflow can be assigned to new work load with trigger() method
|
| |
|
void | Failed () |
| | the current work failed.
|
| |
| void | Error (std::string error) |
| | emit error message More...
|
| |
| void | Progress (int progress) |
| | emit percentage of the work load 0-100 More...
|
| |
| void | Warning (std::string warning) |
| | emit warning output message More...
|
| |
| void | Info (std::string info) |
| | emit information output message More...
|
| |
| bool | isDirExist (std::string path) |
| | check if the directory is exist. More...
|
| |
| bool | mkdir (std::string path) |
| | create directory in given path. More...
|
| |
|
cv::Ptr< cv::StereoMatcher > | MatcherPtr |
| |
|
GlobalMapObject::Ptr | GlobalMap |
| |
|
bool | m_isInit = false |
| | default indicator of wether the workflow is initialized, the workflow may or may not use this variable to indicate if its initialized, it depends on the implementation of isInit() method.
|
| |
| bool DualFrameReconstructor::load |
( |
JsonNode & |
fs | ) |
|
|
overridevirtual |
load data and settings from file
this method will load data such as keypoints, descriptors, translation matrices in DataFlowObject and its sub-classes from the given JsonNode instance. or will load parameters and settings in WorkFlowObject and its sub-classes to the given JsonNode instance, and automatically initialize the WorkFlow with these parameters
- Parameters
-
- Returns
- true load successfully
-
false load failed or initialization falied.
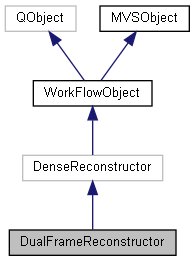
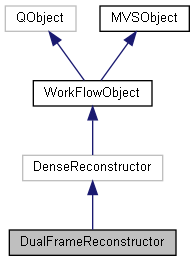
Reimplemented from DenseReconstructor.
| bool DualFrameReconstructor::save |
( |
JsonNode & |
fs | ) |
|
|
overridevirtual |
save data and settings to file
this method will save data such as keypoints, descriptors, translation matrices in DataFlowObject and its sub-classes to the given JsonNode instance, or will save parameters and settings in WorkFlowObject and its sub-classes to the given JsonNode instance.
- Parameters
-
- Returns
- true save successfully
-
false save failed
Reimplemented from DenseReconstructor.
 Public Types inherited from DenseReconstructor
Public Types inherited from DenseReconstructor